
Neue künstliche Muskeln: leichtere, sicherere und robustere Roboter
Aus Studien am Zürcher Polytechnikum, einer Technologie für Muskelgruppen, die denen des Menschen ähnlicher und sensibler im Umgang mit der Umwelt sind
Forscher der ETH Zürich haben kürzlich künstliche Muskeln für Roboterbewegungen entwickelt, ihre Lösung bietet jedoch mehrere Vorteile gegenüber bisher bekannten Technologien.
Es ist eine weitere Untersuchung wert und kann in allen Fällen eingesetzt werden, in denen Roboter eher weich als starr sein müssen oder empfindlicher mit der Umgebung interagieren müssen.
Viele Robotiker träumen davon, Roboter zu bauen, die nicht nur eine Kombination aus Metall oder anderen harten Materialien und Motoren sind, sondern auch weicher und anpassungsfähiger.
„Weiche“ Automaten könnten auf ganz andere Weise mit der Umgebung interagieren; Sie könnten beispielsweise Stöße abfedern, wie es menschliche Gliedmaßen tun, oder einen Gegenstand sanft greifen.
Dies hätte auch Vorteile beim Energieverbrauch: Heutzutage benötigt die Bewegung von Robotern meist viel Energie, um eine Position über einen längeren Zeitraum zu halten, während Soft-Systeme diese besser speichern könnten.
Was liegt also näher, als den menschlichen Muskel als Vorbild zu nehmen und zu versuchen, ihn nachzubilden?
Auf Wiedersehen, NCCR Robotics: Zwölf volle Jahre im Dienst der Schweiz
Es gibt eine Drohne, die auf Bäume „klettert“, um sie zu schützen

Jeder natürliche Muskel kontrahiert auch als Reaktion auf einen ausreichenden elektrischen Impuls
Die Funktionsweise künstlicher Muskeln basiert zwangsläufig auf der Biologie.
Wie ihre natürlichen Gegenstücke ziehen sich künstliche Muskeln als Reaktion auf einen elektrischen Impuls zusammen.
Künstliche Muskeln bestehen jedoch nicht aus Zellen und Fasern, sondern aus einem mit einer Flüssigkeit (meist Öl) gefüllten Beutel, dessen Hülle teilweise mit Elektroden bedeckt ist.
Wenn diese Elektroden eine elektrische Spannung erhalten, kommen sie zusammen und drücken die Flüssigkeit in den Rest des Beutels, der sich beugt und somit in der Lage ist, ein Gewicht zu heben.
Ein einzelner Sack entspricht einem kurzen Muskelfaserbündel.
Mehrere dieser Säcke können zu einem kompletten Antriebselement zusammengefügt werden, das auch Aktuator oder einfacher künstlicher Muskel genannt wird.
Auszeichnung für ProteusDrone, den weichen Roboter mit mutierten Formen
Ein Roboterhund: die von der Tierbiologie inspirierte Schweizer Erfindung
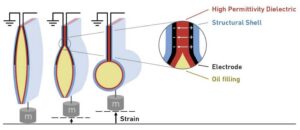
(Illustration: Gravert et al/Science/ETH Zürich)
Ursprünglich benötigten elektrostatische Aktoren eine Spannung von 6.000 bis 10.000 Volt
Die Idee, künstliche Muskeln zu entwickeln, ist nicht neu, doch ihrer Verwirklichung stand bisher ein großes Hindernis entgegen: Elektrostatische Aktoren arbeiteten nur mit extrem hohen Spannungen, von etwa 6.000 bis 10.000 Volt.
Diese Anforderung hatte mehrere Konsequenzen: So mussten die Muskeln beispielsweise an große Hochleistungsspannungsverstärker angeschlossen werden, sie funktionierten im Wasser nicht und waren für den Menschen nicht ganz ungefährlich.
Eine neue Lösung wurde jetzt von entwickelt Robert Katzschmann, Professor für Robotik an der ETH Zürich, zusammen mit Stephan-Daniel Gravert, Elia Varini und weiteren Kollegen.
Einen Artikel über ihre Version eines künstlichen Muskels, der tatsächlich mehrere Vorteile bietet, veröffentlichten sie in einem Artikel auf der Informationsseite „Science Advances“.
Stephan-Daniel Gravert, der als wissenschaftlicher Assistent im Labor von Robert Katzschmann arbeitet, hat eine neuartige Hülle für die Tasche entworfen.
Eine neue britisch-schweizerische Feuerlöschdrohne soll Feuerwehrleuten helfen
So „lernen“ in der Schweiz Roboter die Geheimnisse des Trekkings

(Foto: Gravert und andere, Wissenschaft, 2024)
Die Lösung für die Zukunft? Heute besteht es aus ferroelektrischem Material mit hoher Permeabilität
Die Forscher nennen die neuen künstlichen Muskeln HALVE-Aktuatoren, wobei HALVE für „Hydraulically Amplified Low-Voltage Electrostatic“ steht.
„Bei anderen Aktoren befinden sich die Elektroden außen an der Hülle. Bei uns besteht die Hülle aus mehreren Schichten. Wir haben ein ferroelektrisches Material mit hoher Permeabilität, das also in der Lage ist, relativ große Mengen elektrischer Energie zu speichern, genommen und es mit einer Schicht aus Elektroden kombiniert. Anschließend haben wir alles mit einer Polymerhülle überzogen, die hervorragende mechanische Eigenschaften aufweist und die Tasche stabiler macht.“, er erklärt.
Auf diese Weise konnten die Forscher die benötigte Spannung reduzieren, denn durch die deutlich höhere Permittivität des ferroelektrischen Materials lassen sich trotz niedriger Spannung große Kräfte erzielen.
Stephan-Daniel Gravert und Elia Varini haben nicht nur gemeinsam die Hülle der HALVE-Aktuatoren entwickelt, sondern die Aktuatoren auch selbst im Labor für den Einsatz in zwei spezifischen Robotern gebaut.
In Tel Aviv ein Enel-Labor zum Einsatz von KI und Robotik im Energiebereich
So kann der Atlas-Roboter bereits mit uns arbeiten und interagieren
(Foto: Video-Screenshot von Gravert et al., Science, 2024)
Technische „Zangen“ und „Fische“ zeigen, was der in der Schweiz entwickelte Muskel leisten kann
Ein Beispiel für einen Roboter ist ein 11 Zentimeter hoher Greifer mit zwei Fingern.
Jeder Finger wird durch drei in Reihe geschaltete Taschen des HALVE-Aktuators bewegt.
Ein kleines Akku-Netzteil versorgt den Roboter mit 900 Volt.
Zusammen wiegen Akku und Netzteil gerade mal 15 Gramm.
Der gesamte Bremssattel inklusive Leistungs- und Steuerelektronik wiegt 45 Gramm.
Der Greifer kann einen glatten Kunststoffgegenstand mit ausreichend Kraft greifen, um sein Eigengewicht zu tragen, wenn der Gegenstand mit einem Seil in die Luft gehoben wird.
„Dieses Beispiel zeigt hervorragend, wie klein, leicht und effizient HALVE-Aktuatoren sind. Es bedeutet auch, dass wir unserem Ziel, integrierte muskelbetriebene Systeme zu schaffen, einen großen Schritt nähergekommen sind.“, sagt Katzschmann zufrieden.
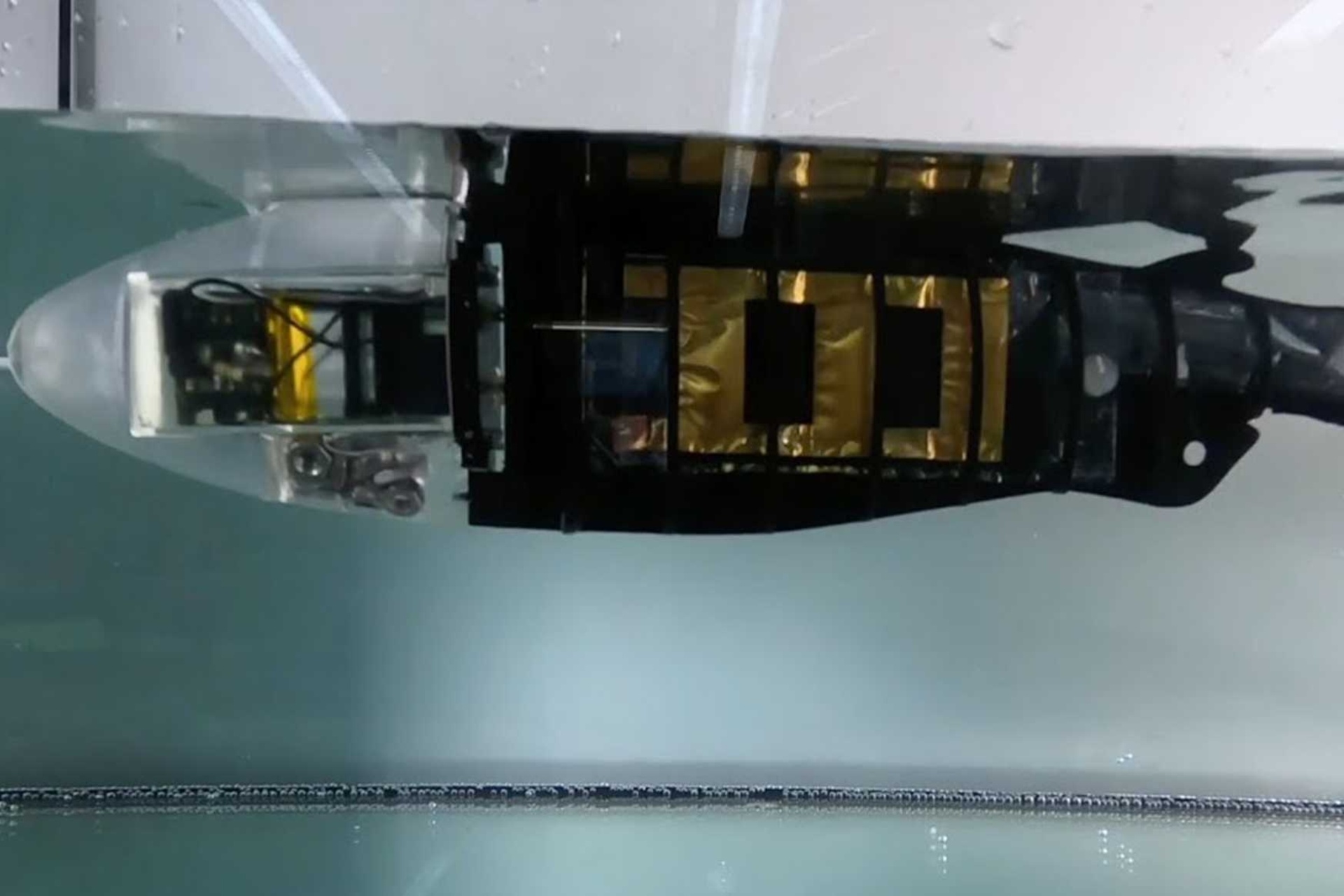
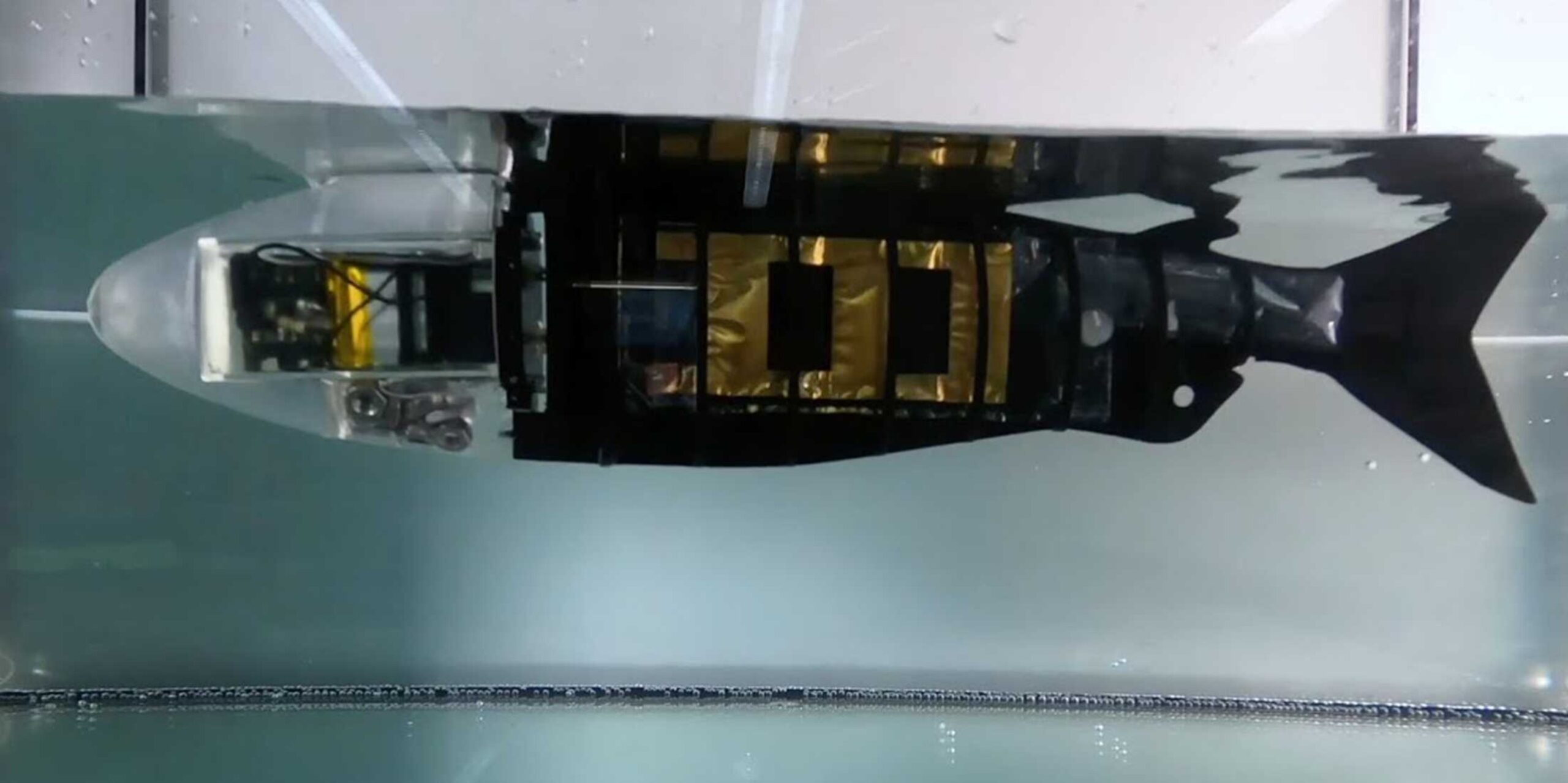
Das zweite Objekt ist ein fast 30 Zentimeter langer, fischähnlicher Schwimmer, der sich problemlos im Wasser bewegen kann.
Es besteht aus einem „Kopf“, der die Elektronik enthält, und einem flexiblen „Körper“, an dem die „Hydraulically Amplified Low-Voltage Electrostatic“-Aktuatoren befestigt sind.
Diese Aktoren bewegen sich abwechselnd in einem Rhythmus, der die typische Schwimmbewegung erzeugt.
Der autonome Fisch kann mit einer Geschwindigkeit von drei Zentimetern pro Sekunde in 14 Sekunden aus einem Zustand der Stasis herauskommen, und das alles untergetaucht in normales Leitungswasser.
Ein Roboterhund: die von der Tierbiologie inspirierte Schweizer Erfindung
In der Schweiz die Eidgenössische Fachhochschule für transparente und zuverlässige KI

Die neuen Aktuatoren sind deutlich robuster als andere künstliche Muskeln und außerdem wasserdicht
Dieses zweite Beispiel ist wichtig, da es eine weitere neue Funktion von HALVE-Aktuatoren demonstriert.
Da die Elektroden nicht mehr geschützt außerhalb der Hülle liegen, sind die künstlichen Muskeln nun wasserdicht und können sogar in leitfähige Flüssigkeiten getaucht verwendet werden.
„Der Fisch verdeutlicht einen allgemeinen Vorteil dieser Aktoren: Die Elektroden sind vor der äußeren Umgebung geschützt und umgekehrt wird die Umgebung durch die Elektroden geschützt. Man kann diese elektrostatischen Aktoren also beispielsweise im Wasser verwenden oder berühren.“, ergänzt der Professor von der Eidgenössischen Technischen Hochschule Zürich.
Der schichtweise Aufbau der Hüllen hat noch einen weiteren Vorteil: Die neuen Aktoren sind deutlich robuster als andere künstliche Muskeln.
Im Idealfall sollten Umschläge große und schnelle Bewegungen ausführen können.
Allerdings kann schon der kleinste Herstellungsfehler, etwa ein Staubkorn zwischen den Elektroden, zu einem Stromausfall, einer Art „Mini-Blitzeinschlag“, führen.
Am 4. November findet in Lausanne der "Swiss Robotics Day" statt
Mit dem DroneHub eine beispiellose… „Voliere“ für die Drohnenforschung

„Mini-Lightning“-Probleme gelöst, Unternehmen bereit für die Großserienproduktion
„Als dies bei früheren Modellen passierte, brannte die Elektrode durch und es entstand ein Loch in der Hülle. Dadurch konnte die Flüssigkeit entweichen und der Antrieb wurde unbrauchbar.“, erklärt Stephan-Daniel Gravert.
Dieses Problem wurde bei HALVE-Aktuatoren gelöst, da sich ein einzelnes Loch dank der schützenden äußeren Kunststoffschicht im Wesentlichen von selbst verschließt.
Dadurch bleibt das Gehäuse auch nach einem Stromausfall voll funktionsfähig.
Die beiden Forscher sind sichtlich froh, einen entscheidenden Durchbruch bei der Entwicklung künstlicher Muskeln geschafft zu haben, sind aber auch realistisch.
Wie Robert Katzschmann sagt: „Jetzt müssen wir diese Technologie für die Massenproduktion vorbereiten, und das können wir hier im ETH-Labor nicht machen.“ Ohne zu viele Enthüllungen zu machen, kann ich sagen, dass wir bereits Interesse von Unternehmen registrieren, die mit uns zusammenarbeiten möchten.“
Beispielsweise könnten künstliche Muskeln eines Tages in neuen Robotern, Prothesen oder tragbaren Geräten eingesetzt werden.
Mit anderen Worten, in Technologien zur Anwendung im und am menschlichen Körper…
Eine Himbeere aus ... Silikon, um Robotern die Ernte beizubringen
Die richtige Hommage von Lugano an das junge Robotik-Team Smilebots



Uneingeschränkter Greifer, angetrieben durch HALVE-Aktuatoren, der einen Block PLA greift
Ungebundener künstlicher Fisch, angetrieben durch HALVE-Aktuatoren, im Leitungswasser
Das könnte Sie auch interessieren:

In Brasilien findet das weltweit erste Treffen zwischen Biosicherheit und Synchrotrons statt
In Campinas wird ein Labor mit maximaler biologischer Eindämmung der Stufe NB4 an die Lichtquellen eines Teilchenbeschleunigers angeschlossen

In Südtirol ist EDIH NOI heute der neue Bezugspunkt für KI
In Bozen werden 4,6 Millionen Euro aus dem PNRR-Fonds für Dienstleistungen lokaler Unternehmen im Bereich der Digitalisierung von Nachrichtendiensten bereitgestellt.
Österreich, Deutschland und die Schweiz für „innovativere“ Güterbahnen
DACH-Minister Leonore Gewessler, Volker Wissing und Albert Rösti: Die Einführung des Digital Automatic Pairing ist ein Schlüsselelement

Überredung oder Manipulation? Entstehung und historische Wirkung von PR
Auf diese Weise bietet Public Relations vom anspruchsvollen Dialog im antiken Griechenland bis zum aktuellen digitalen Zeitalter weiterhin kontinuierliche Innovation

 //
//